Bagging & aggregation¶
A stage is not a single grid tensor but an aggregate of \(n_{\text{grids}}\) bagged grids,
fit independently and combined into one stage component. This page covers the combination
math; the code lives in StagePredictor
(fit_ensemble, aggregate_bagged_two_tensor, combine_grids).
Why aggregate components, not predictions¶
An arithmetic mean of products is not a product, so averaging the stage predictors \(\hat{m}_{\pm}^{(\ell,c)}\) would break the separable structure. Instead, the per-feature components \(\hat{m}_{\pm,j}^{(\ell,c)}\) are averaged. But factor-wise averaging is fragile: separable representations are non-identifiable, so independently fitted factors need not lie in a comparable gauge — two grids can fit the same stage yet sit at opposite ends of the \((\lambda_+,\lambda_-)\) spectrum. The align → normalize → reference → filter → average pipeline below resolves this.
The aggregation pipeline¶
Working in the backbone/tilt parametrization, the combination proceeds in steps (Combine Bagged Two-Tensor Grids):
-
Align to a common grid. Refine every bag to the union of all split points per axis (
refine_grids_to_union_two_tensor), so all grids share interval structure. -
Normalize (gauge-fix). For each bag and axis \(j\), center \(\log b_j\) and \(d_j\) by subtracting their empirical means over the data: \(\log b_j \leftarrow \log b_j - \tfrac1n\sum_i \log b_j(x_j^{(i)})\) and \(d_j \leftarrow d_j - \tfrac1n\sum_i d_j(x_j^{(i)})\). This makes similarities compare shapes rather than scale or offset. (\(\lambda\)'s are untouched here.)
-
Choose a reference. Pick the grid closest to the \((\lambda_+,\lambda_-)\) centroid:
\[ \mathcal{G}^\star = \arg\min_{c}\ \sum_{c'=1}^{n_{\text{grids}}}\bigl[(\lambda_{+}^{(c)}-\lambda_{+}^{(c')})^2 + (\lambda_{-}^{(c)}-\lambda_{-}^{(c')})^2\bigr]. \] -
Score by similarity. For each candidate form per-point backbone products and tilt sums, \(\mathbf{b}_c = \bigl[\prod_j b_j^{(c),k_j(i)}\bigr]_{i=1}^n\) and \(\mathbf{d}_c = \bigl[\sum_j d_j^{(c),k_j(i)}\bigr]_{i=1}^n\) (with \(k_j(i)\) the interval index of \(x_j^{(i)}\)), and take cosine similarities to the reference:
\[ \mathrm{sim}_b = \frac{\mathbf{b}^\star\cdot\mathbf{b}_c}{\|\mathbf{b}^\star\|\,\|\mathbf{b}_c\|}, \qquad \mathrm{sim}_d = \frac{\mathbf{d}^\star\cdot\mathbf{d}_c}{\|\mathbf{d}^\star\|\,\|\mathbf{d}_c\|}. \]The combined score rescales the product of the two cosines into \([0,1]\):
\[ \mathrm{score}(c) = \frac{(\mathrm{sim}_b + 1)(\mathrm{sim}_d + 1)}{4} \in [0,1]. \] -
Trim. Keep the top \(K = \lceil(1-\xi)\,n_{\text{grids}}\rceil\) candidates by score, where \(\xi\in[0,1]\) is the
similarity_threshold(default \(\xi=0\) keeps all). This removes a competing representation branch before averaging. -
Average and reconstruct. Average the surviving factors in log-space and rebuild the backbone/tilt. With \(a_{\pm,j}^k = b_j^k e^{\pm d_j^k}\),
\[ \bar{a}_{\pm,j}^k = \exp\!\Bigl(\tfrac{1}{|\mathcal{K}|}\sum_{c\in\mathcal{K}} \log a_{\pm,j}^{(c),k}\Bigr), \qquad \bar{b}_j^k = \sqrt{\bar{a}_{+,j}^k\,\bar{a}_{-,j}^k}, \quad \bar{d}_j^k = \tfrac12\log\!\bigl(\bar{a}_{+,j}^k/\bar{a}_{-,j}^k\bigr). \] -
Combine scalars by geometric mean: \(\lambda_{\pm}^{\text{combined}} = \exp\bigl(\tfrac{1}{|\mathcal{K}|}\sum_{c\in\mathcal{K}}\log\lambda_{\pm}^{(c)}\bigr)\).
After combination the stage coefficients are refit by least squares (the backfit).
Aggregation modes in code¶
The Aggregation enum on StagePredictor selects how the bag is reduced to the
primary_grid_tensor:
| Mode | Behavior |
|---|---|
Mean |
arithmetic mean of the unscaled per-grid predictions |
GeometricMean |
sign-preserving geometric mean of predictions |
Combined |
extract \(\tilde{m}_+, \tilde{m}_-\) from the aggregated two-tensor grid and apply the OLS scaling_plus/scaling_minus |
The component-space pipeline above (align → normalize → similarity-filter → log-space
average) is implemented in aggregate_bagged_two_tensor; the chosen Aggregation then
determines how the combined grid is turned into stage predictions. See
StagePredictor for the exact call path and how
similarity_threshold (\(\xi\)) and the aggregation mode are wired from the Python API.
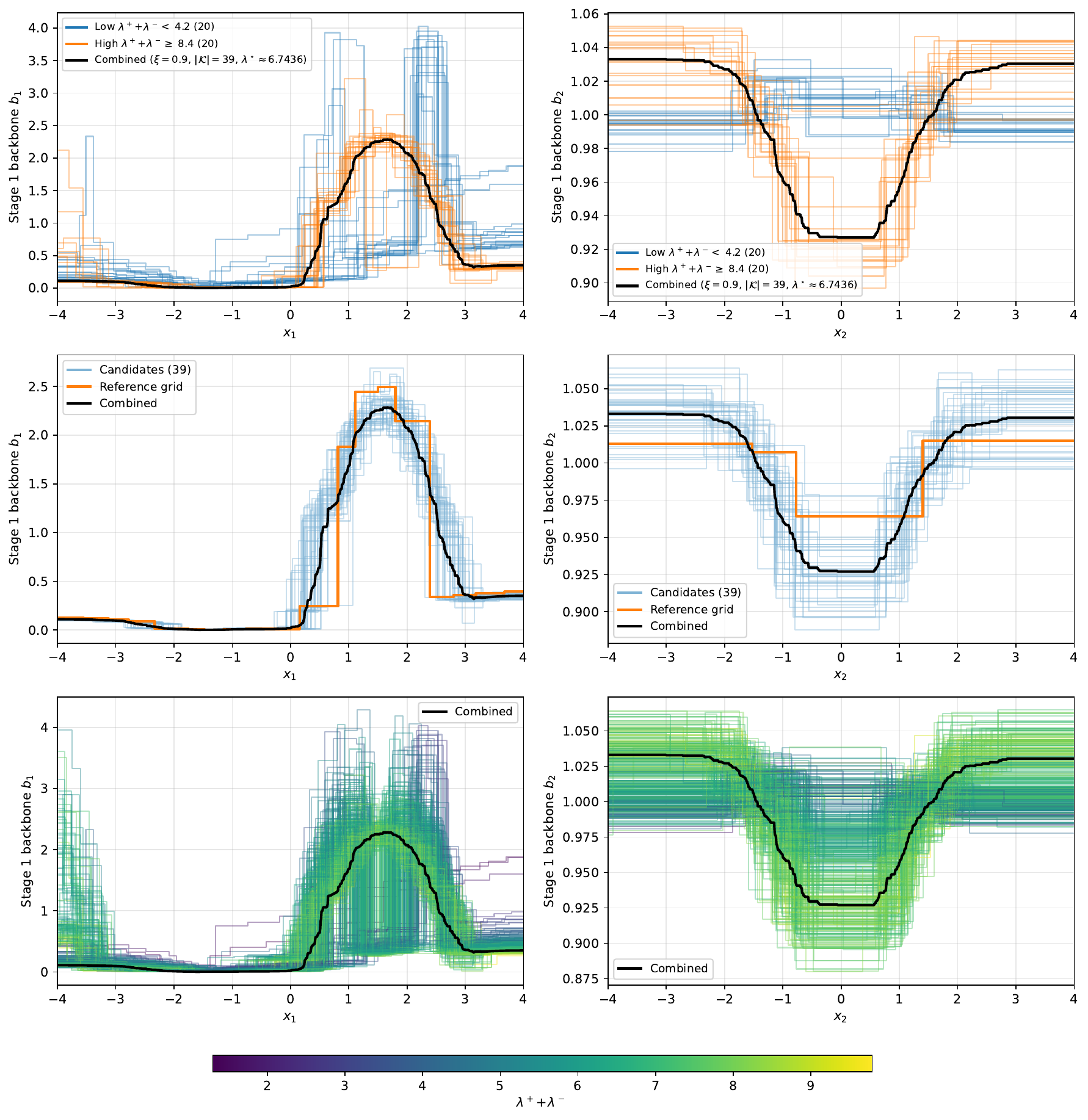
The bimodal-alignment example¶
There is a worked case where bagged grids converge to two distinct backbone representations
of one fitted stage (a consequence of non-identifiability).
Without the similarity filter, averaging across the two branches degrades the fit; the
reference + trim step keeps a single canonical branch. The synthetic2.py example
reproduces this diagnostic — see Examples.
synthetic2.py example script.